Fusion of the ego positions from GPS and NDT matching with Unscented Kalman Filter
This is one example of my work of the object tracking with the fusion of ego positions from both NDT matching pose and GPS signal with Unscented Kalman Filter.
It shows a good stability and real-time performance.
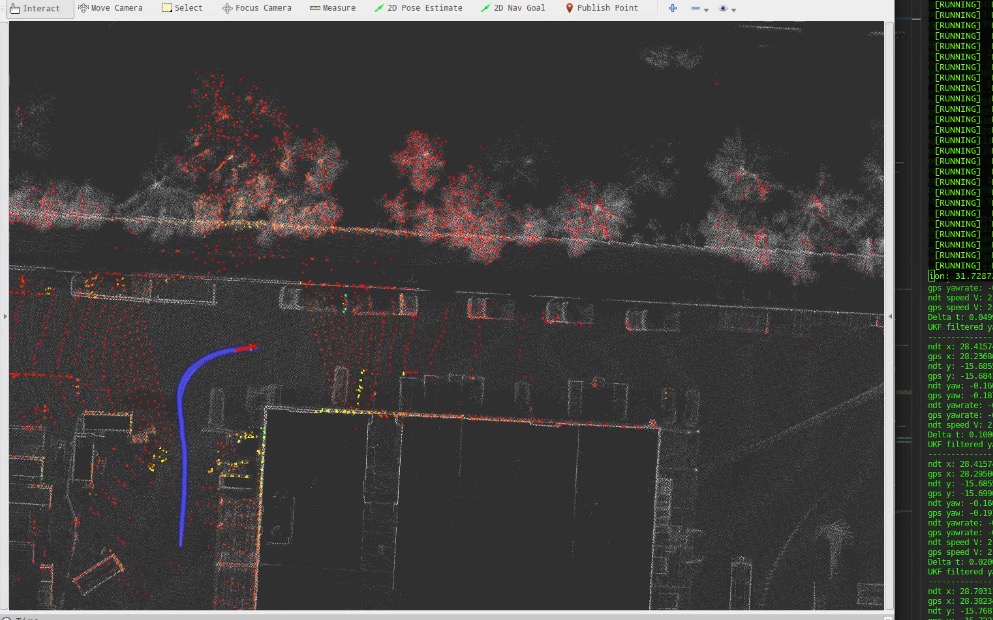
Red arrow: ego pose from NDT matching
Yellow arrow: GPS ego position
Blue arrow and trajectory: ego positions after UKF